Issues upgrading NVIDIA container runtime on Ubuntu server 18.04:
W: An error occurred during the signature verification. The repository is not updated and the previous index files will be used. GPG error: https://nvidia.github.io/libnvidia-container/ubuntu18.04/amd64 InRelease: The following signatures couldn't be verified because the public key is not available: NO_PUBKEY 6ED91CA3AC1160CD
W: An error occurred during the signature verification. The repository is not updated and the previous index files will be used. GPG error: https://nvidia.github.io/nvidia-container-runtime/ubuntu18.04/amd64 InRelease: The following signatures couldn't be verified because the public key is not available: NO_PUBKEY 6ED91CA3AC1160CD
W: An error occurred during the signature verification. The repository is not updated and the previous index files will be used. GPG error: https://nvidia.github.io/nvidia-docker/ubuntu18.04/amd64 InRelease: The following signatures couldn't be verified because the public key is not available: NO_PUBKEY 6ED91CA3AC1160CD
W: Failed to fetch https://nvidia.github.io/libnvidia-container/ubuntu18.04/amd64/InRelease The following signatures couldn't be verified because the public key is not available: NO_PUBKEY 6ED91CA3AC1160CD
W: Failed to fetch https://nvidia.github.io/nvidia-container-runtime/ubuntu18.04/amd64/InRelease The following signatures couldn't be verified because the public key is not available: NO_PUBKEY 6ED91CA3AC1160CD
W: Failed to fetch https://nvidia.github.io/nvidia-docker/ubuntu18.04/amd64/InRelease The following signatures couldn't be verified because the public key is not available: NO_PUBKEY 6ED91CA3AC1160CD
W: Some index files failed to download. They have been ignored, or old ones used instead.
Short demo of EdgeX Foundry using two Raspberry Pi’s. One to generate and send sensor data to EdgeX and another to play the role of an edge device which can receive commands from EdgeX depending on sensor values.
Note: This demo uses the Delhi release since I still haven’t updated the device profile for the “smartVent” Raspberry Pi to work with Edinburgh. I’ll post something cooler once that is working too.
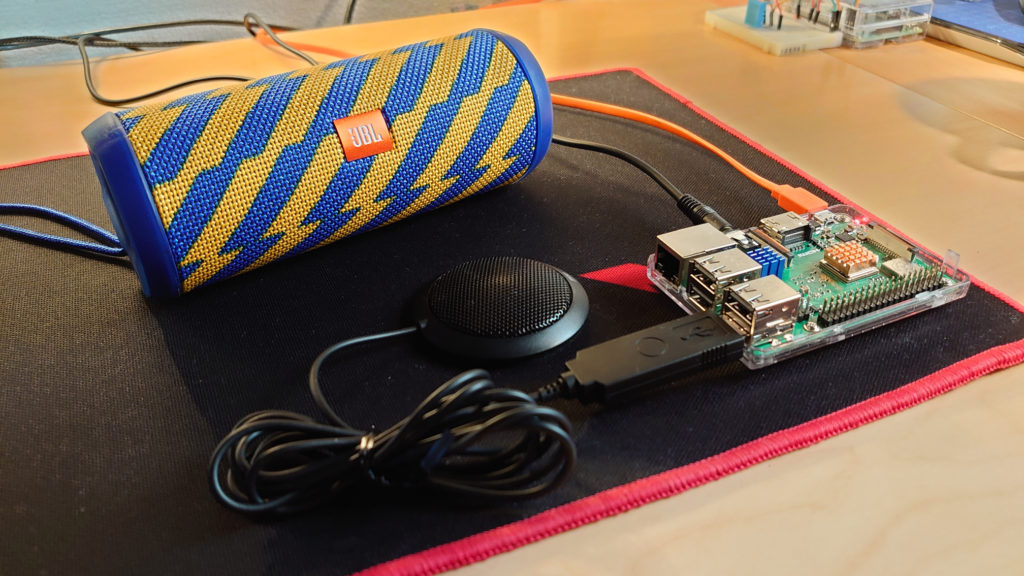
The onboard 3.5mm plug listed as BCM2835 ALSA: Card 0, Device 0 (“hw:0,0”)
The onboard HDMI connection listed as bcm2835 IEC958/HDMI: Card 0, Device 1 (“hw:0,1”)
The USB microphone listed as USB Audio: : Card 1, Device 0 (“hw:1,0”)
In this example we want to use the 3.5mm audio jack, so we’ll use Card 0, Device 0 as the way to locate our speaker device. The USB microphone doesn’t have audio output and is not valid as a speaker setting. It is listed however, which can cause confusion.
Microphone device
To see which devices are available to use as a microphone, use the following command
pi@raspberrypi:~ $ arecord -l
**** List of CAPTURE Hardware Devices ****
card 1: Microphone [USB Microphone], device 0: USB Audio [USB Audio]
Subdevices: 1/1
Subdevice #0: subdevice #0
We only have one device and that’s the USB microphone listed as Card 1 and Device 0 (“hw:1,0”).
Configuring the audio settings
To set the audio settings, create or modify the .asoundrc file in the users home directory as follows. That would be /home/pi/.asoundrc for the default user.
Logging out / in, rebooting or reloading the audio service would apply the settings.
To apply the settings system-wide, copy the .asoundrc file to /etc/asound.conf
Test the new settings
To test recording audio, use arecord without specifying the device to record from (if our settings are correct, the default device would already be configured and picked up by arecord):
arecord -f S16_LE -r 48000 test.wav
To play the recorded sound use aplay
aplay test.wav
Sample rate
If things still don’t work, consider checking the sampling rate of the microphone. I had bought a new mic for use with AWS Lex and Alexa but it wouldn’t work. The sampling rate required was 16000 and the mic didn’t support it.
It turns out an old PlayStation3 camera has a 16000 sample rate. Checking rate by the following: